4.7 Ø
5184+ Bewertungen5184+ Bewertungen
Bestellen bis 16:00 Uhr für Versand am selben Tag
14 Tage Rückgabe
DE
Privat
Geschäftlich
GPIO-Projekt 7 – Schrittmotor-Einführung
In diesem Projekt lernen Sie, wie Sie einen Schrittmotor mit einem Raspberry Pi steuern. Ein Schrittmotor dreht sich in präzisen Schritten und ermöglicht Ihnen so eine genaue Steuerung der Bewegungen. Dieses Projekt verwendet einen 28BYJ-48-Schrittmotor und einen ULN2003-Treiber.
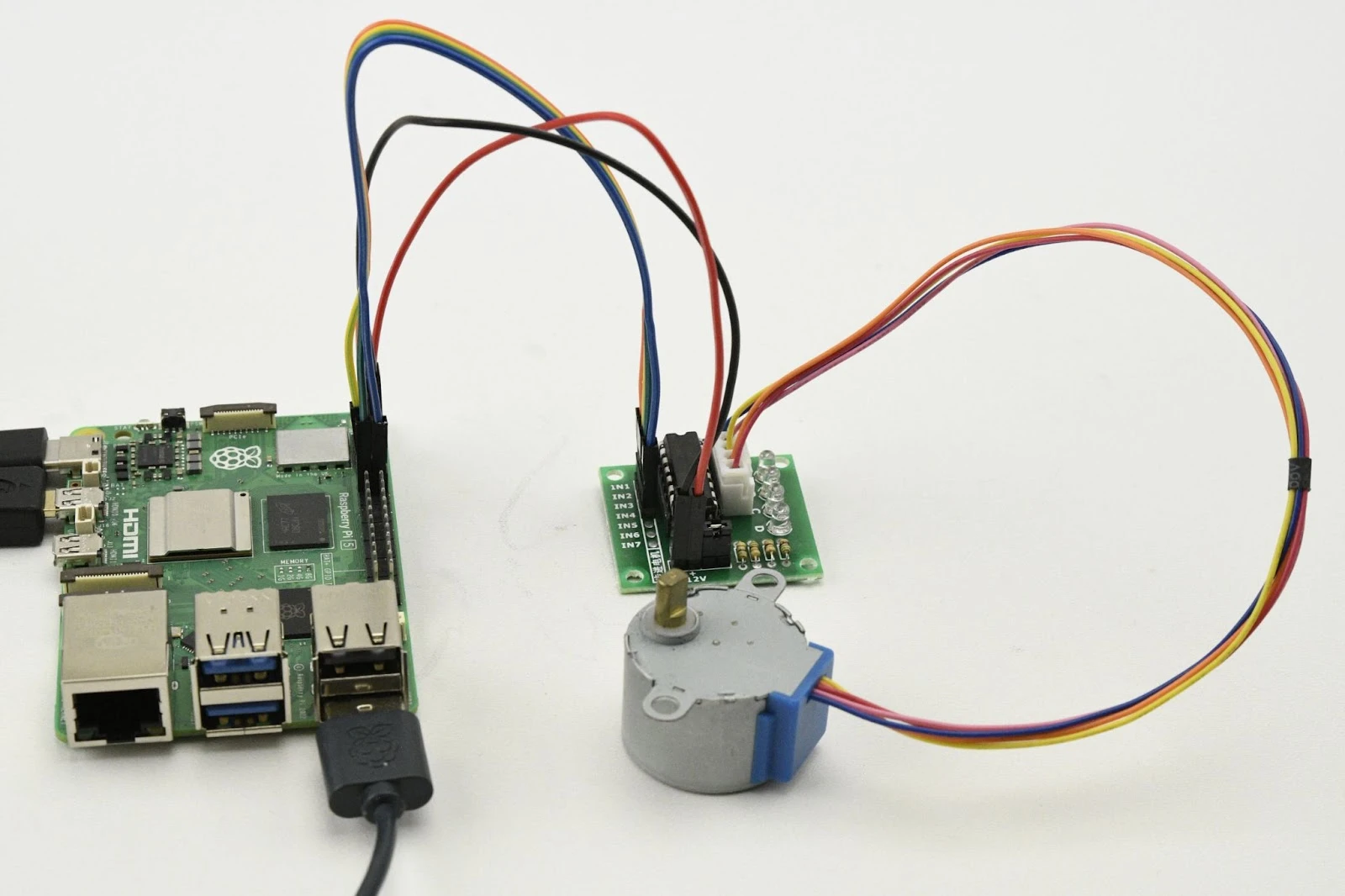
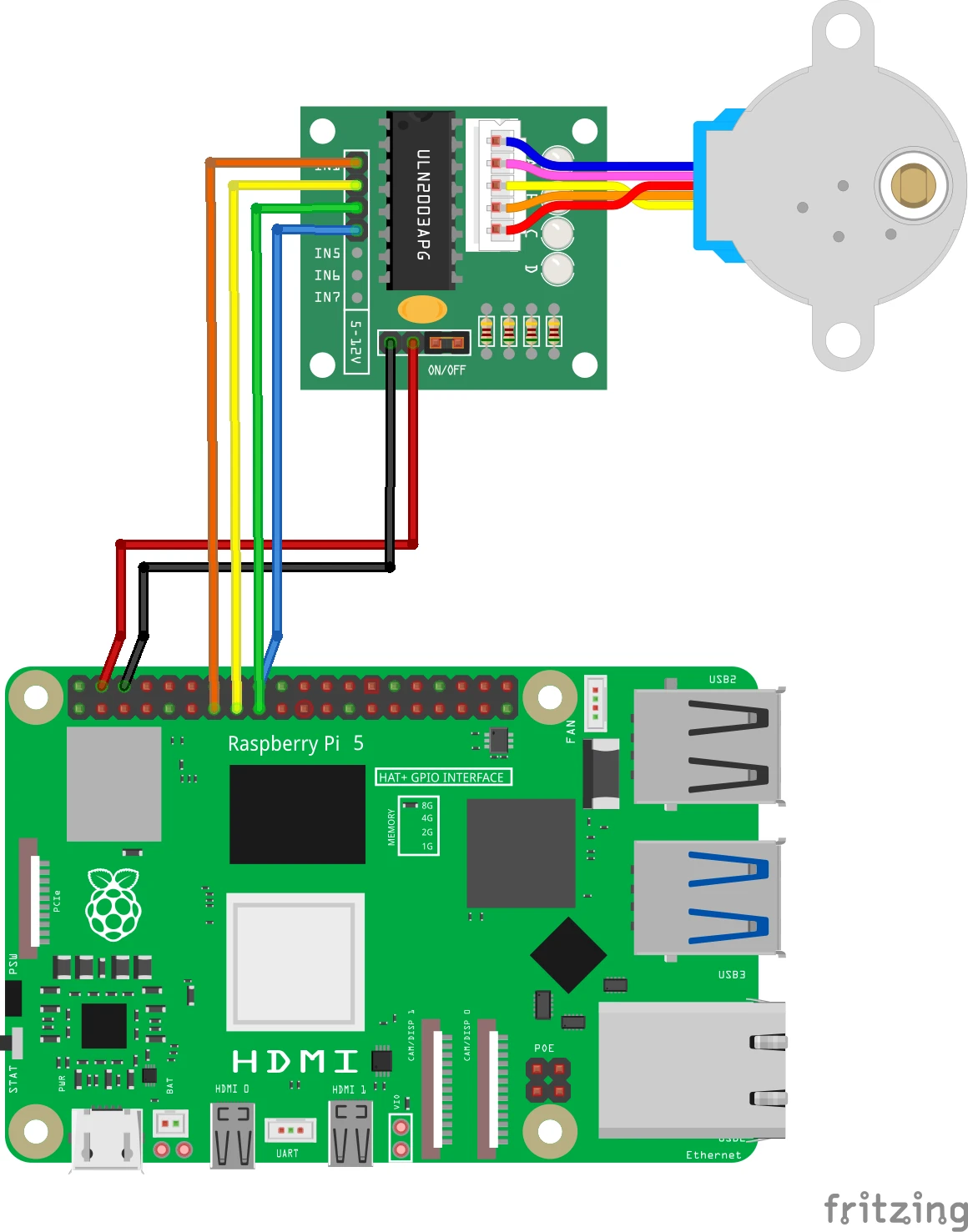
Anschlussplan
- Verbinden Sie den Schrittmotor mit dem ULN2003-Treiber:
- Verbinden Sie den Schrittmotorstecker mit dem Header des ULN2003-Treibers.
- Verbinden Sie den ULN2003-Treiber mit dem Raspberry Pi:
- IN1: Verbinden mit GPIO 17 (Pin 11).
- IN2: Verbinden mit GPIO 27 (Pin 13).
- IN3: Verbinden mit GPIO 22 (Pin 15).
- IN4: Verbinden mit GPIO 23 (Pin 16).
- Stromversorgung für den ULN2003-Treiber:
- VCC: An 5 V (Pin 2) anschließen.
- GND: Mit GND (Pin 6) verbinden.
Pinout Reference
GPIO | Pin # | Function | Connection |
| GPIO 17 | Pin 11 | IN1 | ULN2003 driver |
| GPIO 27 | Pin 13 | IN2 | ULN2003 driver |
| GPIO 22 | Pin 15 | IN3 | ULN2003 driver |
| GPIO 23 | Pin 16 | IN4 | ULN2003 driver |
| 5V | Pin 2 | Nutrition | ULN2003 driver |
| GND | Pin 6 | Earth (Ground) | ULN2003 driver |
Python-code in Thonny
Schritt 1: RPi.GPIO installieren
Überprüfen Sie, ob die Bibliothek RPi.GPIO installiert ist. Dies ist im Raspberry Pi-Betriebssystem normalerweise Standard.
pip install RPi.GPIOSchritt 2: Schreiben Sie Ihren Code
Öffnen Sie die Thonny Python IDE und geben Sie den folgenden Code ein:
import RPi.GPIO as GPIO
from time import sleep
# GPIO-pinnen koppelen aan ULN2003 IN-pinnen
IN1 = 17
IN2 = 27
IN3 = 22
IN4 = 23
# Pinnen instellen
GPIO.setmode(GPIO.BCM)
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
# Stepper motor sequence (4-fase stappen)
step_sequence = [
[1, 0, 0, 0],
[1, 1, 0, 0],
[0, 1, 0, 0],
[0, 1, 1, 0],
[0, 0, 1, 0],
[0, 0, 1, 1],
[0, 0, 0, 1],
[1, 0, 0, 1]
]
def set_step(w1, w2, w3, w4):
"""Stel de status van de motorpinnen in."""
GPIO.output(IN1, w1)
GPIO.output(IN2, w2)
GPIO.output(IN3, w3)
GPIO.output(IN4, w4)
def step_motor(steps, delay, reverse=False):
"""Draai de motor een aantal stappen."""
if reverse:
sequence = step_sequence[::-1] # Keer de sequentie om
else:
sequence = step_sequence
for _ in range(abs(steps)):
for step in sequence:
# Zorg ervoor dat elke stap 4 waarden bevat
if len(step) == 4:
set_step(*step)
else:
raise ValueError("Step sequence must contain exactly 4 values")
sleep(delay)
try:
print("Stepper motor draait vooruit...")
step_motor(512, 0.002) # Draai 512 stappen vooruit
sleep(1)
print("Stepper motor draait achteruit...")
step_motor(512, 0.002, reverse=True) # Draai 512 stappen achteruit
sleep(1)
except KeyboardInterrupt:
print("\nProgramma gestopt.")
finally:
GPIO.cleanup() # Reset de GPIO-instellingen
Schritt 3: Speichern Sie die Datei
Klicken Sie auf Datei > Speichern unter und benennen Sie die Datei stepper_motor_intro.py.
Schritt 4: Führen Sie das Skript aus
Klicken Sie oben in der Thonny-Benutzeroberfläche auf die grüne Schaltfläche Ausführen (▶).
Wie funktioniert es?
- Schrittfolge:
- Die Engine durchläuft die Sequenzen in der step_sequence -Liste zum Aktivieren.
- Der Schrittmotor()< span style="background-color:transparent;color:#000000;">Die Funktion prüft, wie viele Schritte der Motor macht und wie schnell die Schritte sind.
- Geschwindigkeit anpassen:
- Passen Sie den Wert von Verzögerung an ein im Schrittmotor()Funktion zum Ändern der Motorgeschwindigkeit.
- Richtung anpassen:
- Verwenden Sie einen negativen Wert für Schritte um den Motor in die andere Richtung zu drehen.
Ergebnis
- Vorwärtsdrehung: Der Schrittmotor dreht sich 512 Schritte vorwärts (eine volle Drehung).
- Rückwärtsdrehung: Der Schrittmotor dreht sich 512 Schritte rückwärts.
Experimentieren
- Geschwindigkeit anpassen:
- Ändern Sie den Wert von Verzögerung in Schrittmotor() (zum Beispiel 0,001 für schnellere oder 0,005 für langsamere Geschwindigkeit).
- Anzahl der Schritte anpassen:
- Passen Sie die Anzahl der Schritte an, um eine halbe Drehung (256 Schritte) oder mehrere Drehungen durchzuführen.
- Kombinierte Bewegungen:
- Kombinieren Sie Vorwärts- und Rückwärtsbewegungen mit unterschiedlichen Geschwindigkeiten, um komplexe Bewegungen zu erstellen.