4.7 Ø
5184+ Bewertungen5184+ Bewertungen
Bestellen bis 16:00 Uhr für Versand am selben Tag
14 Tage Rückgabe
DE
Privat
Geschäftlich
GPIO-Projekt 8 – Soundgesteuerter Motor
Anfänger
30 Minuten
113,90
In diesem Projekt lernen Sie, wie Sie mit einem Geräuschsensor (im GPIO-Kit enthalten ) einen Motor steuern. Der Geräuschsensor erkennt Geräusche (beispielsweise ein Klatschen) und sendet ein Signal an den Raspberry Pi , der einen Motor aktiviert.
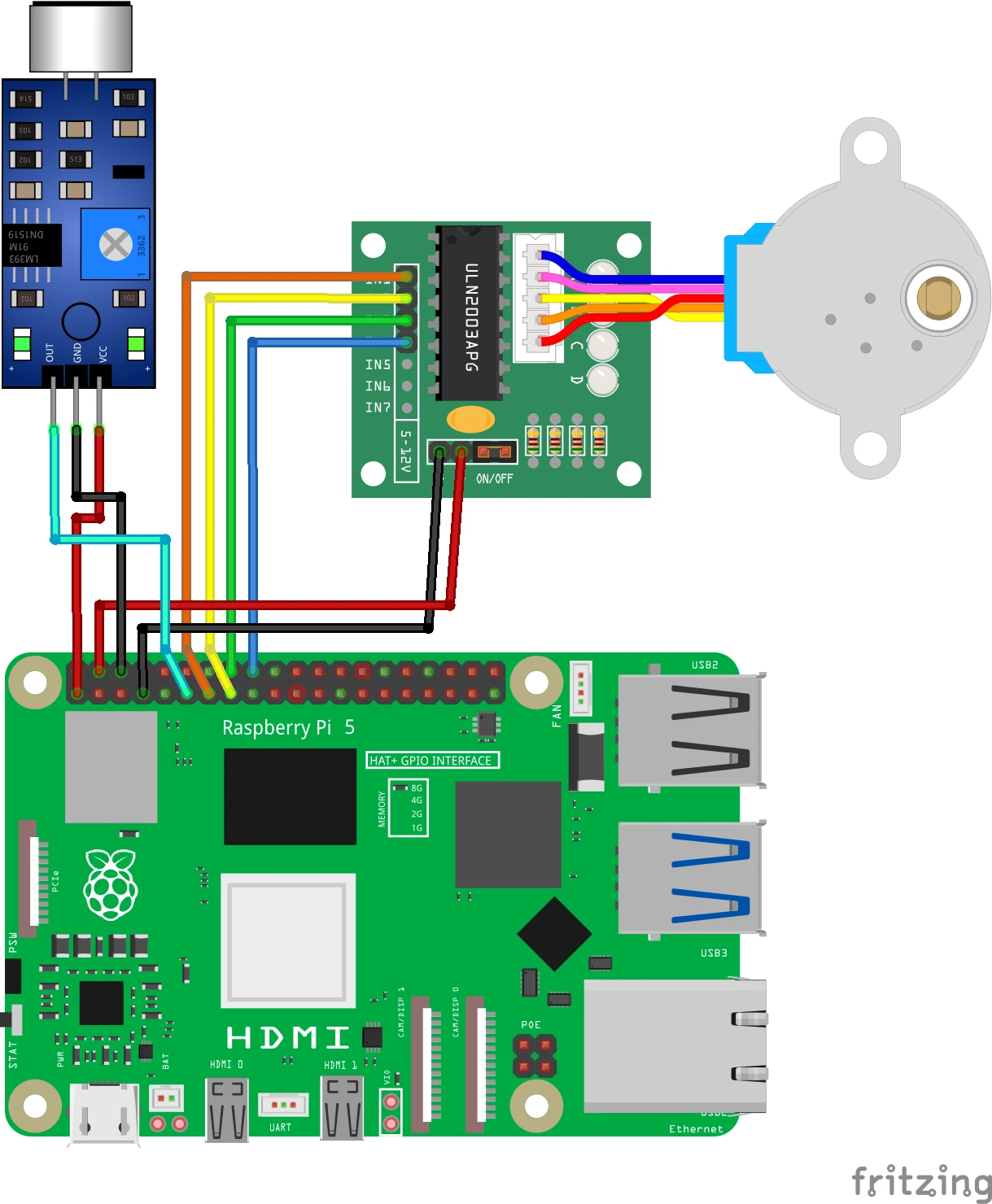
Anschlussplan
Schließen Sie den Geräuschsensor an:
- VCC : An 3,3 V (Pin 1) anschließen.
- GND : Mit GND (Pin 6) verbinden.
- DO (digitaler Ausgang) : Verbindung mit GPIO 17 (Pin 11) herstellen.
Verbinden Sie den ULN2003-Treiber mit dem Schrittmotor:
- Schrittmotor : Verbinden Sie den Schrittmotoranschluss mit dem Header des ULN2003-Treibers.
- ULN2003-Treiber :
- IN1 : Verbindung mit GPIO 27 (Pin 13) .
- IN2 : Verbindung mit GPIO 22 (Pin 15) .
- IN3 : Verbindung mit GPIO 23 (Pin 16) .
- IN4 : Verbindung mit GPIO 24 (Pin 18) .
- VCC : An 5 V anschließen (Pin 2) .
- GND : Mit GND (Pin 6) verbinden.
Pinbelegungsreferenz
GPIO | Pin-Nr. | Funktion | Verbindung |
| GPIO 17 | Stift 11 | Digitaleingang | Schallsensor DO |
| GPIO 27 | Stift 13 | Schrittmotor | ULN2003 IN1 |
| GPIO 22 | Stift 15 | Schrittmotor | ULN2003 IN2 |
| GPIO 23 | Stift 16 | Schrittmotor | ULN2003 IN3 |
| GPIO 24 | Stift 18 | Schrittmotor | ULN2003 IN4 |
| 3,3 V | Stift 1 | Stromversorgung | Schallsensor VCC |
| 5 V | Stift 2 | Stromversorgung | ULN2003 VCC |
| Masse | Stift 6 | Erde (Boden) | Schallsensor und ULN2003 |
Python-Code in Thonny
Schritt 1: Schreiben Sie Ihren Code
Öffnen Sie die Thonny Python IDE und geben Sie den folgenden Code ein:
import RPi.GPIO as GPIO
from time import sleep
from collections import deque
# Geluidssensor en motor-pinnen
IN1 = 17
IN2 = 27
IN3 = 22
IN4 = 23
SOUND_SENSOR_PIN = 24
# GPIO instellen
GPIO.setmode(GPIO.BCM)
GPIO.setup(SOUND_SENSOR_PIN, GPIO.IN) # Geluidssensor als input
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
# Stepper motor sequentie (4-fase stappen)
step_sequence = [
[1, 0, 0, 0],
[1, 1, 0, 0],
[0, 1, 0, 0],
[0, 1, 1, 0],
[0, 0, 1, 0],
[0, 0, 1, 1],
[0, 0, 0, 1],
[1, 0, 0, 1]
]
# Instellingen voor piekdetectie
HISTORY_SIZE = 10 # Hoeveel metingen we bijhouden
THRESHOLD = 7 # Aantal HIGH's in HISTORY_SIZE om als piek te zien
MINIMUM_ACTIVE_TIME = 1 # Minimal actief blijven (seconden)
# Historie van geluidmetingen
sound_history = deque([1] * HISTORY_SIZE, maxlen=HISTORYSIZE)
def set_step(w1, w2, w3, w4):
"""Stel de status van de motorpinnen in."""
GPIO.output(IN1, w1)
GPIO.output(IN2, w2)
GPIO.output(IN3, w3)
GPIO.output(IN4, w4)
def step_motor(steps, delay):
"""Draai de motor een aantal stappen."""
for _ in range(steps):
for step in step_sequence:
set_step(*step)
sleep(delay)
try:
while True:
# Lees de huidige status van de geluidssensor
current_state = GPIO.INPUT(SOUND_SENSOR_PIN)
# Voeg de huidige meting toe aan de historie
sound_history.append(current_state)
# Tel hoeveel keer HIGH (1) in historie
low_count = sound_history.count(0)
# Controleer of er een piek is
if low_count >= THRESHOLD:
print("Piek in geluid gedetecteerd! Steppermotor draait.")
step_motor(512, 0.002) # Draai 512 stappen vooruit
sound_hitory.clear() # Reset de historie na een plek
sound_history.extend([1] * HISTORY_SIZE) # Vermijd snelle heractivatie
sleep(MINIMUM_ACTIVE_TIME) # Zorg dat de motor niet constant triggert
sleep(0.01)
except KeyboardInterrupt:
print("\nProgramma gestopt.")
finally:
GPIO.cleanup() # Reset de GPIO-instellingen
Schritt 2: Speichern Sie die Datei
Klicken Sie auf Datei > Speichern unter und nennen Sie die Datei sound_controlled_motor.py .
Schritt 3: Ausführen des Skripts
Klicken Sie oben in der Thonny-Benutzeroberfläche auf die grüne Schaltfläche „Ausführen“ (▶).
Wie funktioniert es?
- Geräuschsensor:
- Der Sensor erkennt Geräusche wie beispielsweise Klatschen und sendet ein High-Signal (HIGH) an GPIO 17.
- Schrittmotor:
- Sobald ein Ton erkannt wird, dreht sich der Motor 512 Schritte (vorwärts).
- Geschwindigkeit und Schritte anpassen:
- Passen Sie den Wert für Verzögerung und Schritte in der Funktion step_motor() an , um die Geschwindigkeit und Distanz der Motordrehung zu ändern.
Ergebnis
- Ton erkannt : Der Schrittmotor führt eine vollständige Umdrehung aus (512 Schritte).
- Kein Geräusch erkannt : Der Motor bleibt still.
Experimentieren
- Richtung anpassen:
- Lassen Sie den Motor rückwärts laufen, indem Sie die Reihenfolge der Schrittfolgeliste umkehren .
- Verwendung von Licht- oder anderen Sensoren:
- Ersetzen Sie den Geräuschsensor durch einen anderen Eingang, beispielsweise einen LDR oder einen Druckknopf.
- Blinkende LED hinzufügen:
- Fügen Sie eine LED hinzu, die blinkt, wenn der Motor läuft.