4.7 gem.
5183+ beoordelingen5183+ beoordelingen
Voor 16:00 besteld = dezelfde dag verzonden
14 dagen retour
NL
Particulier
Zakelijk
Arduino MKR Motor Shield

Beschrijving MKR Motor shield
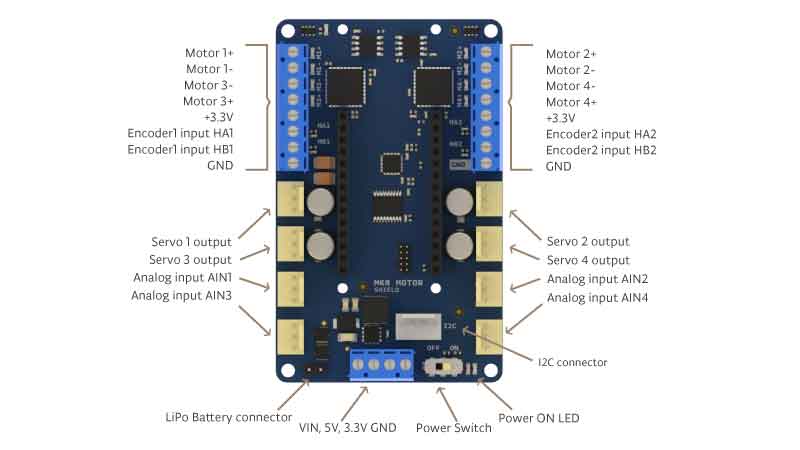
De MKR Motor Carrier shield is een MKR-uitbreidingskaart die is ontworpen om servo-, DC- en stappenmotoren te besturen.
De Carrier kan ook worden gebruikt om andere actuatoren en sensoren aan te sluiten via een reeks 3-pins mannelijke headers.
Arduino MKR Motor Shield
Uitverkocht
€ 57,95
Voor 16:00 besteld = dezelfde dag verzonden
Gratis verzending vanaf €99,95
14 dagen gratis terugsturen
Zelfde dag ophalen bij ons in Leusden
5183+ beoordelingen
4.7 gem.
5183+ beoordelingenSKU: MKR2004 Categorieën: Arduino , Arduino Boards , Arduino MKR
Beschrijving MKR Motor shield
De MKR Motor Carrier shield is een MKR-uitbreidingskaart die is ontworpen om servo-, DC- en stappenmotoren te besturen.
De Carrier kan ook worden gebruikt om andere actuatoren en sensoren aan te sluiten via een reeks 3-pins mannelijke headers.