4.7 gem.
5183+ beoordelingen5183+ beoordelingen
Voor 16:00 besteld = dezelfde dag verzonden
14 dagen retour
NL
Particulier
Zakelijk
Arduino Project: Alarm
Het alarm bouwen en Bedraden
Nu gaan we het project bouwen.
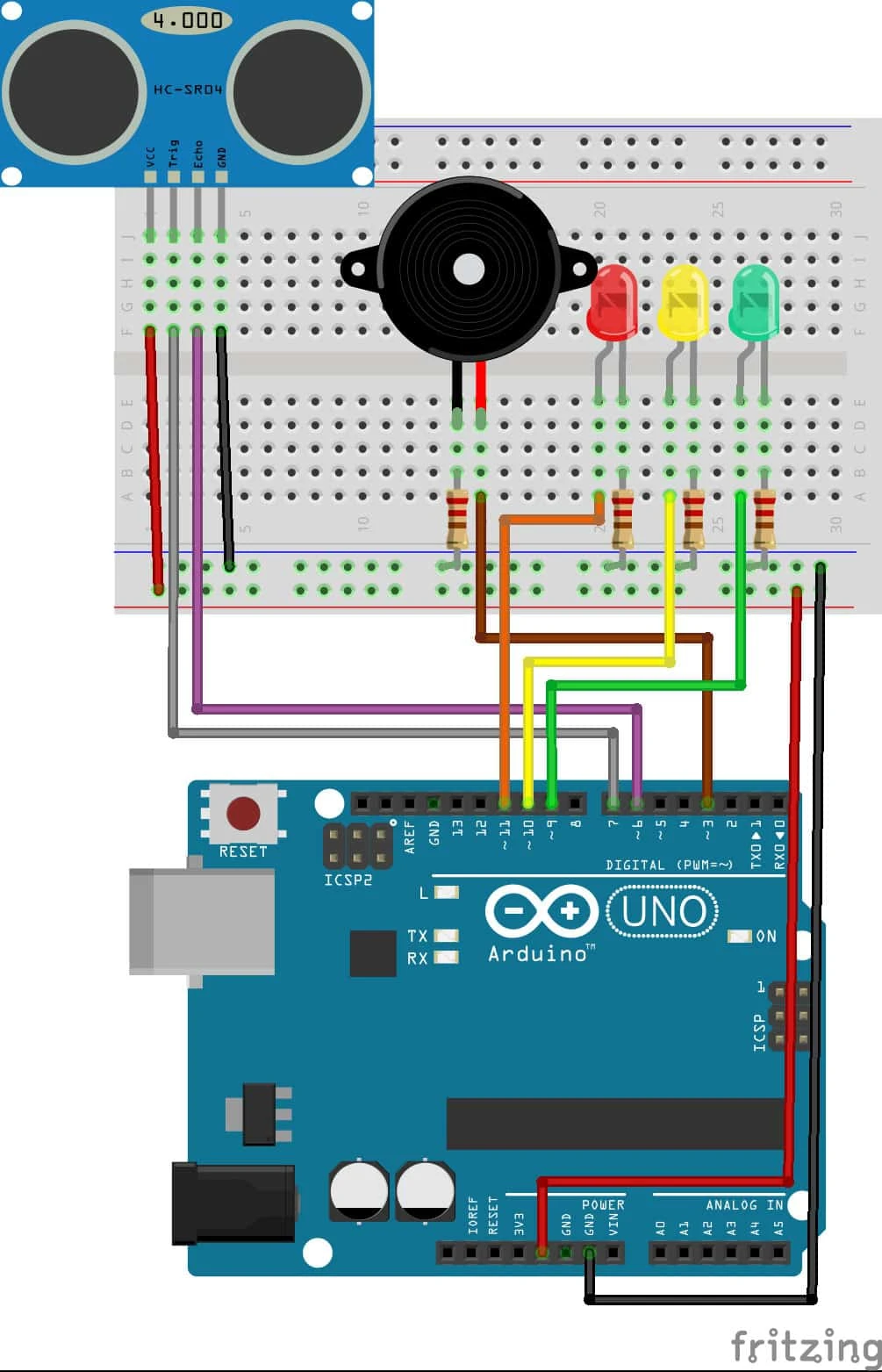
We beginnen bij het bedraden en het plaatsen van de componenten op het breadboard doe dit volgens onderstaande foto zorg er wel voor dat de ultrasonische sensor de juiste kant op staat gericht dus van het breadboard af. Vervolgens hebben de 3 LEDs en buzzer een weerstandje nodig. Zodat de spanning niet te hoog wordt en de componentjes opblaast. Hierbij moet wel opgelet worden op welke pinnetje van de leds en buzzer de weerstand wordt aangesloten. De lange pin van de LEDs en buzzer is de + deze kan volgens het schema rechtstreeks bedraad worden naar de Arduino pins. De weerstandjes sluiten wij aan op de – (de korte pin) van de LEDs en buzzer. Deze weerstandjes worden parallel op de – rij van het breadboard aangesloten. Zorg ervoor dat je deze componentjes op de juiste manier aansluit, anders werkt je Arduino Alarm niet!Sluit vervolgens de overige jumper wires aan volgens het schema.
Ook is het belangrijk dat je de juiste componenten op de juiste Arduino pins aansluit, anders werkt de code niet!
Trig -> pin 7
Echo -> pin 6
Buzzer + -> pin 3
Rood ledje + -> pin 11
Geel ledje + -> pin 10
Groen ledje + -> pin 9

Arduino alarm programmeren
#define trigPin 7 //#define geeft een naam aan de aansluit punten die we gebruiken.
#define echoPin 6
#define greenLed 9
#define yellowLed 10
#define redLed 11
#define buzzer 3
int geluid = 500; //Hier maken we een variabele aan voor de Hertz (hz) dat de buzzer gaat klinken.
void setup()
{
Serial.begin(9600); //Hier bereiden we de aansluitpunten en de seriële monitor voor
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(greenLed,OUTPUT);
pinMode(yellowLed, OUTPUT);
pinMode(redLed, OUTPUT);
pinMode(buzzer, OUTPUT);
}
void loop()
{
long duur; //Hier maken we nog twee variabelen aan voor de afstand en de duur dat het signaal van de sensor onderweg is.
long afstand;
digitalWrite(trigPin, LOW); //Hier berekenen we met de duur van het signaal wat de afstand tot het object is.
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duur = pulseIn(echoPin, HIGH);
afstand = (duur / 2) / 29.1;
Serial.print(afstand); //Hier schrijven we de afstand op de seriële monitor
Serial.println(” cm”);
if(afstand > 50) //Als de afstand grote is dan 50cm:
{
digitalWrite(greenLed, HIGH);
digitalWrite(yellowLed, LOW);
digitalWrite(redLed, LOW);
}
else if(afstand < 50 || afstand > 10) //Als de afstand tussen de 50 en de 10 cm ligt:
{
digitalWrite(greenLed, LOW);
digitalWrite(yellowLed, HIGH);
digitalWrite(redLed, LOW);
}
else if(afstand < 10) //Als de afstand kleiner is dan 10cm:
{
digitalWrite(greenLed, LOW);
digitalWrite(yellowLed, LOW);
digitalWrite(redLed, HIGH);
tone(buzzer, geluid);
delay(100);
noTone(buzzer);
}
else if(afstand <=0) //Als de afstand kleiner of gelijk aan 0 is: (foutmelding)
{
Serial.println(“Buiten bereik”);
tone(buzzer, geluid);
delay(500);
noTone(buzzer);
}
delay(300);
}