4.7 gem.
5183+ beoordelingen5183+ beoordelingen
Voor 16:00 besteld = dezelfde dag verzonden
14 dagen retour
NL
Particulier
Zakelijk
GPIO Project 7 - Stepper motor intro
Beginner
30 Minuten
113,90
In dit project leer je hoe je een steppermotor aanstuurt met behulp van een Raspberry Pi. Een steppermotor draait in precieze stappen, waardoor je nauwkeurig bewegingen kunt controleren. Dit project gebruikt een 28BYJ-48 steppermotor en een ULN2003 driver (vind je in de GPIO Kit).
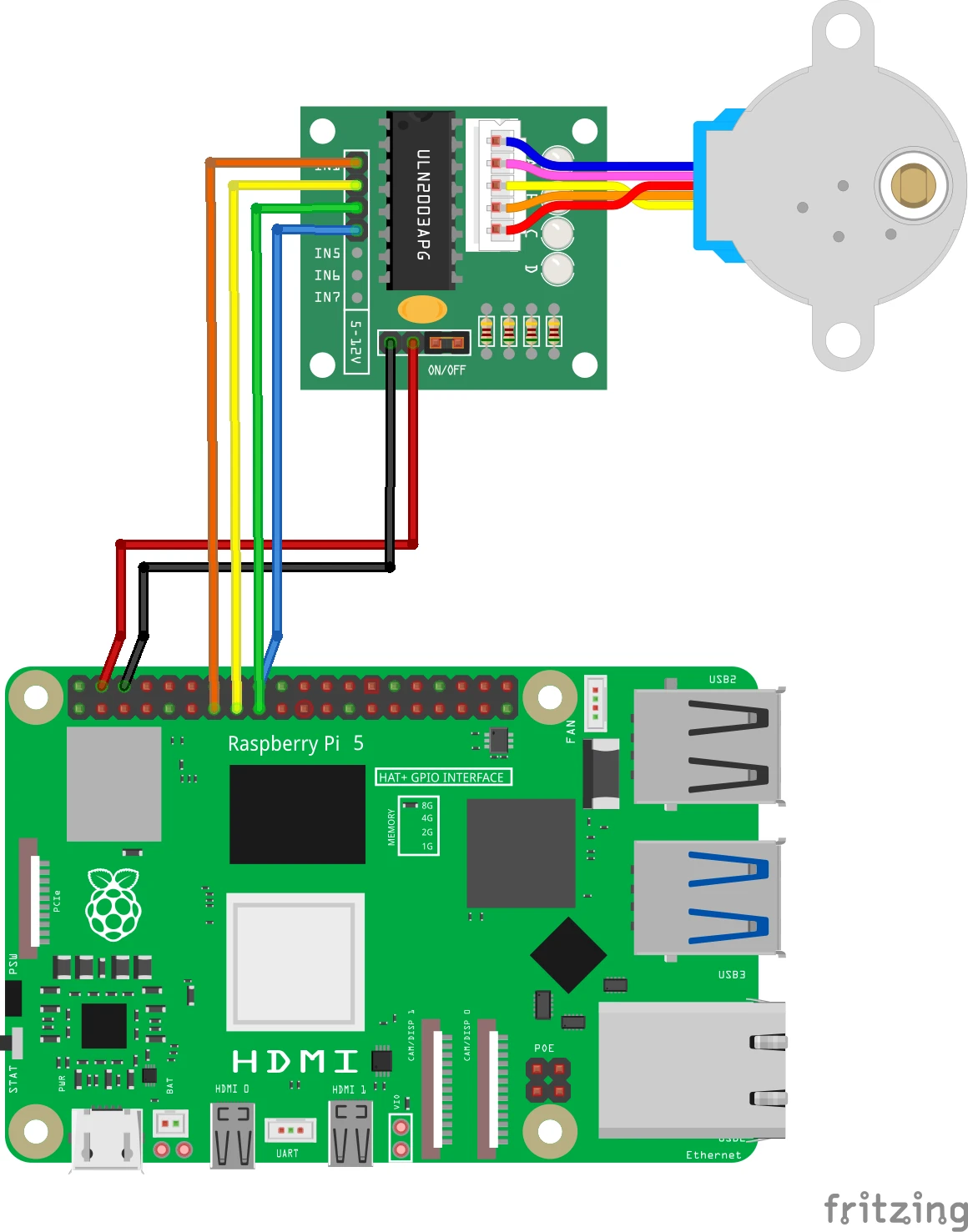
Aansluitschema
- Verbind de steppermotor met de ULN2003 driver:
- Sluit de connector van de steppermotor aan op de header van de ULN2003-driver.
- Verbind de ULN2003 driver met de Raspberry Pi:
- IN1: Verbind met GPIO 17 (pin 11).
- IN2: Verbind met GPIO 27 (pin 13).
- IN3: Verbind met GPIO 22 (pin 15).
- IN4: Verbind met GPIO 23 (pin 16).
- Voeding voor de ULN2003 driver:
- VCC: Verbind met 5V (pin 2).
- GND: Verbind met GND (pin 6).
Pinout Referentie
GPIO | Pin # | Functie | Aansluiting |
| GPIO 17 | Pin 11 | IN1 | ULN2003-driver |
| GPIO 27 | Pin 13 | IN2 | ULN2003-driver |
| GPIO 22 | Pin 15 | IN3 | ULN2003-driver |
| GPIO 23 | Pin 16 | IN4 | ULN2003-driver |
| 5V | Pin 2 | Voeding | ULN2003-driver |
| GND | Pin 6 | Aarde (Ground) | ULN2003-driver |
Python-code in Thonny
Stap 1: Installeer RPi.GPIO
Controleer of de RPi.GPIO-bibliotheek is geïnstalleerd. Dit is meestal standaard in Raspberry Pi OS aanwezig.
pip install RPi.GPIOStap 2: Schrijf je code
Open de Thonny Python IDE en voer de volgende code in:
import RPi.GPIO as GPIO
from time import sleep
# GPIO-pinnen koppelen aan ULN2003 IN-pinnen
IN1 = 17
IN2 = 27
IN3 = 22
IN4 = 23
# Pinnen instellen
GPIO.setmode(GPIO.BCM)
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
# Stepper motor sequence (4-fase stappen)
step_sequence = [
[1, 0, 0, 0],
[1, 1, 0, 0],
[0, 1, 0, 0],
[0, 1, 1, 0],
[0, 0, 1, 0],
[0, 0, 1, 1],
[0, 0, 0, 1],
[1, 0, 0, 1]
]
def set_step(w1, w2, w3, w4):
"""Stel de status van de motorpinnen in."""
GPIO.output(IN1, w1)
GPIO.output(IN2, w2)
GPIO.output(IN3, w3)
GPIO.output(IN4, w4)
def step_motor(steps, delay, reverse=False):
"""Draai de motor een aantal stappen."""
if reverse:
sequence = step_sequence[::-1] # Keer de sequentie om
else:
sequence = step_sequence
for _ in range(abs(steps)):
for step in sequence:
# Zorg ervoor dat elke stap 4 waarden bevat
if len(step) == 4:
set_step(*step)
else:
raise ValueError("Step sequence must contain exactly 4 values")
sleep(delay)
try:
print("Stepper motor draait vooruit...")
step_motor(512, 0.002) # Draai 512 stappen vooruit
sleep(1)
print("Stepper motor draait achteruit...")
step_motor(512, 0.002, reverse=True) # Draai 512 stappen achteruit
sleep(1)
except KeyboardInterrupt:
print("\nProgramma gestopt.")
finally:
GPIO.cleanup() # Reset de GPIO-instellingen
Stap 3: Sla het bestand op
Klik op Bestand > Opslaan als en noem het bestand stepper_motor_intro.py.
Stap 4: Voer het script uit
Klik op de groene Run-knop (▶) bovenin de Thonny-interface.
Hoe werkt het?
- Stap-sequentie:
- De motor draait door de sequenties in de step_sequence-lijst te activeren.
- De step_motor()-functie controleert hoeveel stappen de motor draait en de snelheid van de stappen.
- Snelheid aanpassen:
- Pas de waarde van delay aan in de step_motor()-functie om de snelheid van de motor te veranderen.
- Richting aanpassen:
- Gebruik een negatieve waarde voor steps om de motor in de andere richting te draaien.
Resultaat
- Vooruit draaien: De steppermotor draait 512 stappen vooruit (één volledige rotatie).
- Achteruit draaien: De steppermotor draait 512 stappen achteruit.
Experimenteren
- Snelheid aanpassen:
- Verander de waarde van delay in step_motor() (bijvoorbeeld 0.001 voor sneller of 0.005 voor langzamer draaien).
- Aantal stappen aanpassen:
- Pas het aantal stappen aan om een halve rotatie (256 stappen) of meerdere rotaties uit te voeren.
- Gecombineerde bewegingen:
- Combineer vooruit- en achteruitbewegingen in verschillende snelheden om complexe bewegingen te creëren.