4.7 gem.
5184+ beoordelingen5184+ beoordelingen
Voor 16:00 besteld = dezelfde dag verzonden
14 dagen retour
NL
Particulier
Zakelijk
Raspberry Pi project: Servo Aansturen
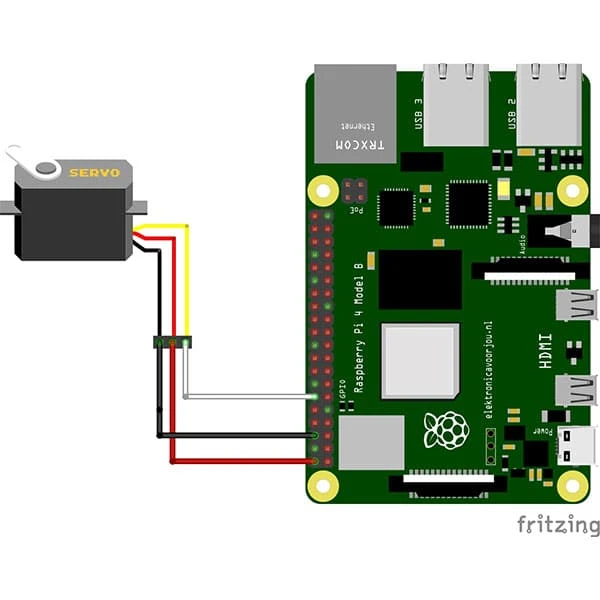
Aansluiten
Om te beginnen moeten we eerst de servo motor aansluiten aan de Raspberry Pi. Dit doe je door de jumperwires aan te sluiten op de Servo Motor. Daarna sluiten we de jumper wire die aan de servomotor vastzitten op de Raspberry Pi 4B. Sluit de draden op de volgende pins: De rode jumper wire op PIN 2 (5volt). De zwarte jumper wire op PIN 6 (Ground) en de laatste jumper wire op PIN 12 (BCM 18).
Programmeren
Als alles goed is aangesloten en je Pi werkt naar behoren kunnen we de code gaan schrijven om de Servo te laten draaien. Open op je Raspberry Pi de Thonny programmeer omgeving. Daarna maak je een nieuw bestand aan genaamd servo_project.py (je kan dit noemen zoals je wil, zolang er maar “.py” achter staat!) Sla dit bestand op en begin met het schrijven van de volgende code:
from gpiozero import AngularServo
from time import sleep
servo = AngularServo(18, min_pulse_width=0.0006, max_pulse_width=0.0023)
while (True):
servo.angle = 90
sleep(2)
servo.angle = 0
sleep(2)
servo.angle = -90
sleep(2)Aan de hand van deze code stuur je je servo motor aan. Laten we de code regel voor regel bekijken en kijken welke regel wat doet!
De code begint met het importeren van de van de bibliotheken AngularServo en Sleep.
servo = AngularServo(18, min_pulse_width=0.0006, max_pulse_width=0.0023)Aan de hand van dit stukje code creëren we een variabele genaamd servo. In dit geval zeggen we dat de data pin GPIO 18 is. En we zeggen wat de min en max pulse width is, namelijk 0.0006 en 0.0023.
while (True):
servo.angle = 90
sleep(2)
servo.angle = 0
sleep(2)
servo.angle = -90
sleep(2)Hier maken we een endless loop aan de hand van een “While (True)” statement. De servo gaat hier van de 90 graden hoek naar de 0 graden hoek naar de -90 graden hoek. Met daartussen steeds 2 seconden pauze.
Resultaat
Je hebt nu de Servo aangesloten op je Raspberry Pi en de code geschreven die er voor zal zorgen dat de Servo gaat draaien. Sla je bestand op en klik op “Run” (grote groene knop in “Thonny” met een play button erin”) En kijk wat er gebeurt! Doet jouw servo het niet? Kijk dan even bij de vorige stappen en probeer het nog een keer!
Vond je dit project nou leuk om te doen? Kijk even bij 1 van onze andere projecten!