
Raspberry Pi Pico – Leçon 5 : Raspberry Pi Contrôler le Pico-Servo
Continuez votre aventure de programmation pendant la leçon 5, où nous contrôlons un servo SG90 avec le Raspberry Pi Pico. Cette leçon pédagogique est idéale pour les débutants qui souhaitent débuter avec l'outil de programmation Thonny et MicroPython. Apprenez à utiliser le Raspberry Pi Pico se connecte à votre ordinateur, télécharge des programmes et contrôle un servo SG90. Découvrez les possibilités de l'asservissement avec le Pico et faites vos premiers pas dans son utilisation Raspberry Pi Pico pour le contrôle du moteur. Un projet passionnant pour développer davantage vos compétences !
Ce manuel couvre:
- Niveau - Débutant 25%
- Durée 20 mn 25%
- Coûte 10,95 € 11%
, qualité = 90")
Étape 1 – Conditions requises pour contrôler le servo avec le Raspberry Pi Pico
Étape 2 – Installez le logiciel sur le Raspberry Pi Pico pour contrôler le servo
Vous pouvez ignorer cette étape si vous l'avez déjà fait dans la leçon 1.
Pour assurer la Raspberry PiPour pouvoir programmer avec MicroPython, il faut d'abord flasher le firmware du Pico.
Cela signifie que nous fournissons le logiciel interne qui démarre le pico avec une version Python spéciale.
Téléchargez le firmware depuis le site Web ci-dessous (fichier uf2)
https://micropython.org/download/RPI_PICO/
https://micropython.org/download/RPI_PICO_W/
(Assurez-vous de sélectionner la bonne version du firmware, la version WiFi et la version non WiFi sont différentes)
Appuyez sur le bouton de démarrage blanc du pico et maintenez-le enfoncé.
Branchez le pico sur un port USB de votre ordinateur. (Ensuite, vous pouvez relâcher le bouton)
Il y aura désormais une lettre de lecteur, accessible avec une clé USB.
Copiez le fichier du firmware RPI_PICO_xxxxxx.uf2 sur ce lecteur
(pico redémarrera et le firmware sera installé)
Téléchargez et installez Thonny sur votre PC.
(https://thonny.org/)
Sélectionnez l'interpréteur MicroPython ci-dessous
Outils > Options > Interpréteur > MicroPython (Raspberry Pi Pico)

Placez les composants comme indiqué ci-dessous sur un painboard.
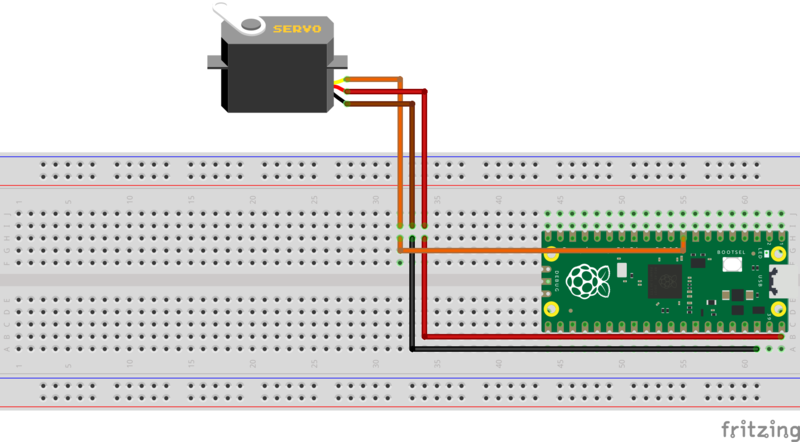
Veuillez noter les couleurs du Servo :
Le câble orange peut également être jaune.
Le marron peut aussi être noir.
Étape 3 – Programmation du Raspberry Pi Pico pour contrôler le servo
Vous pouvez maintenant saisir le programme ci-dessous dans l'interface Thonny.
depuis l'importation du servo Temps d'importation du servo sg90_servo = Servo(pin_id=6) while True : sg90_servo.write(0) time.sleep(1) sg90_servo.write(90) time.sleep(1)
Explication du programme :
- Importer le module Servo
- Importé le module de temps
- .
- Définir la variable sg90_servo sur pin_id GP6 (pin 9)
- .
- Boucle de répétition sans fin
- écrire la valeur 0 sur le servo
- attends 1 seconde
- écrire la valeur 90 sur le servo
- attends 1 seconde
L'exemple ci-dessus utilise la fonction PWM dans le module servo, utilisez ce qui suit pour contrôler le servo avec des routines PWM.
#4500 correspond à 90 degrés comme ci-dessus.
depuis la broche d'importation de machine depuis l'importation de machine PWM depuis l'importation de temps sleep pwm = PWM(Pin(6)) pwm.freq(50) # Fonction servo def setServoCycle (position) : pwm.duty_u16(position) sleep(0.01) while True : pour pos dans la plage (1000,4500,50) : setServoCycle(pos) pour pos dans la plage (4500,1000,-50) : setServoCycle(pos)
L'exemple ci-dessous utilise la fonction PWM dans le module servo, utilisez ce qui suit pour contrôler le servo avec des routines PWM.
#4500 correspond à 90 degrés comme ci-dessus.
Appuyez ensuite sur Enregistrer et enregistrez le programme sur votre propre ordinateur.
Appuyez sur le bouton rouge du panneau d'arrêt pour redémarrer le backend.
(Thonny va maintenant se reconnecter à votre Pico)
Ensuite, vous pouvez appuyer sur le bouton vert (Exécuter le script actuel).
Si le pico est maintenant retiré de l'ordinateur et reconnecté, le programme ne démarrera pas.
Nous avons uniquement testé le code de programmation.
Pour activer le démarrage automatique, il faut à nouveau sauvegarder le programme, puis sélectionner le pico.
Fichier > Enregistrer sous > Raspberry Pi Pico

Enregistrez le programme avec son nom main.py. Le pico démarrera automatiquement le programme portant ce nom lors de la connexion du Pico à un port USB.
Dans ce cas, vous avez besoin d'une connexion avec votre PC et Thonny pour voir les résultats mesurés !
Étape 4 – Résultat : Le servo est contrôlé avec le Raspberry Pi Pico
Vous avez maintenant appris à connecter et à contrôler un (servo) moteur Raspberry Pi Culminer.
Avez-vous aimé réaliser ce projet ? Découvrez nos autres projets, ou Les zes de cette série Pico !